
I'm assuming killing the opponent is considered cheating and would be a cause for disqualification.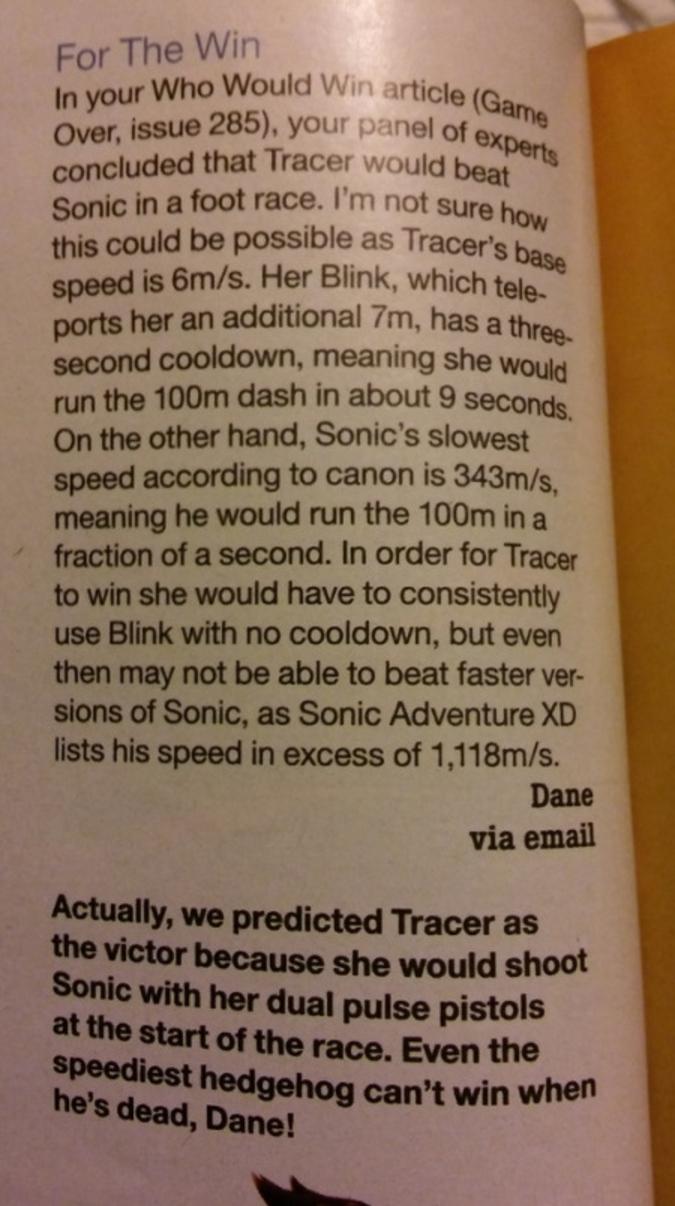
[1:45 PM] omni: alright so right now my model is that tracer and sonic stand with the centers of their bodies D feet apart, on two parallel race tracks R feet long, on an infinite massless plane with no air resistance; sonic has an acceleration function A_s(t) defining his acceleration wrt time which can be integrated to obtain his position travelling in a straight line; tracer has reaction time R_t and sonic has reaction time R_s; tracer has acceleration function A_t(t) and follows a path that continually approaches the point ahead of the center of sonic such that a ray travelling at the speed of light towards that point such that the ray and the center of sonic would intersect the point at the same instant; tracer has a spread S in minutes of arc and a repeating fire rate F measured in pulses per second and is assumed to have infinitely precise eyesight aiming with an infinitely thin reticle; the goal is to calculate the probability of success for tracer given these variables, specifically by first finding a function defining her probability of success at a time t and then integrating the timewise success function Q(t) to obtain the overall probability of success Q
[1:46 PM] omni: that's obviously too many variables to put in a 2D graph but most of them like reaction time should be held constant anyway
[1:47 PM] omni: track length and tracer's spread are probably the best two to graph, and then adding time makes it 3D
[1:51 PM] omni: conclusion: tracer forfeits the race and then receives a nobel prize for discovering the world's first infinite massless plane
Why do you love steam convos?
- Thread starter Fraz
- Start date
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Daily does of hate towards Source:
19:51 - Nuke-m: It's func_flagdetectionzone bug itself
19:51 - Nuke-m: *f bomb* source engine m9
19:54 - Nuke-m: there's a cheeky-ass fix
19:54 - Nuke-m: slapping a func_respawnroomvisualiser right in front of cap area
19:54 - Nuke-m: *k word*
19:51 - Nuke-m: It's func_flagdetectionzone bug itself
19:51 - Nuke-m: *f bomb* source engine m9
19:54 - Nuke-m: there's a cheeky-ass fix
19:54 - Nuke-m: slapping a func_respawnroomvisualiser right in front of cap area
19:54 - Nuke-m: *k word*



reevO - cs.money: terrists bought all the gas cans post 9/11 thats why our jerbs went away and gas was $5 in the 45 states no one cares about
edit:
reevO - cs.money: that indian man came here after becoming a doctor and became a doctor and thats the day i lost my jerb
Flamecat42: was he nuclear jesus
reevO - cs.money: nah he was still in his pre-saiyan bad religion form, american jesus
⛐ worMatty#2166: Hi ben
reevO - cs.money: he just smoked a lot of pot in hermosa beach and sang about how everything suchs
Flamecat42: does he eat oreos milkless
reevO - cs.money: no but if the day comes where i see that happen it may be the only time i ever pull out my concealed handgun
Flamecat42: k
reevO - cs.money: that shits weird, good boy points are like all and well with the world compared to a man eating oreos with no filling
reevO - cs.money: and does he de-icing them, and re-wrap? in the same wrap? to give off less impression? or does he not care and just do it whille we all watch?
edit:
reevO - cs.money: that indian man came here after becoming a doctor and became a doctor and thats the day i lost my jerb
Flamecat42: was he nuclear jesus
reevO - cs.money: nah he was still in his pre-saiyan bad religion form, american jesus
⛐ worMatty#2166: Hi ben
reevO - cs.money: he just smoked a lot of pot in hermosa beach and sang about how everything suchs
Flamecat42: does he eat oreos milkless
reevO - cs.money: no but if the day comes where i see that happen it may be the only time i ever pull out my concealed handgun
Flamecat42: k
reevO - cs.money: that shits weird, good boy points are like all and well with the world compared to a man eating oreos with no filling
reevO - cs.money: and does he de-icing them, and re-wrap? in the same wrap? to give off less impression? or does he not care and just do it whille we all watch?
Last edited:


Fantasmos chat++: Ok lets see if this plugin works, https://www.youtube.com/watch?v=OdYtpErAp-4
Fantasmos chat++ disconnected.
Fantasmos chat++ entered chat.
Fantasmos chat++: Ok, lets see if this plugin works
Fantasmos chat++:https://www.youtube.com/watch?v=OdYtpErAp-4
Fantasmos chat++ disconnected.
Fantasmos chat++ entered chat.
Fantasmos chat++: Lets see if this crashes https://www.youtube.com/watch?v=OdYtpErAp-4
Fantasmos chat++ disconnected.
Fantasmos chat++ disconnected.
Fantasmos chat++ entered chat.
Fantasmos chat++: Ok, lets see if this plugin works
Fantasmos chat++:https://www.youtube.com/watch?v=OdYtpErAp-4
Fantasmos chat++ disconnected.
Fantasmos chat++ entered chat.
Fantasmos chat++: Lets see if this crashes https://www.youtube.com/watch?v=OdYtpErAp-4
Fantasmos chat++ disconnected.
Last edited:
from an argument of how old we are
the thing is too long for this chat but it was going on for around 16 minutes straight...
5:47 PM - Foxeli: is reality even real?
5:48 PM - Foxeli: am I in the matrix?
5:48 PM - Foxeli: god this is a PC program
5:48 PM - Foxeli: WAKE ME UP (wake me up inside)
5:48 PM - - ̗̀ Darren ̖́-: CANT WAKE UP
5:48 PM - Foxeli: and now were spouting memes...
5:48 PM - Foxeli: probably for the better
the thing is too long for this chat but it was going on for around 16 minutes straight...
5:47 PM - Foxeli: is reality even real?
5:48 PM - Foxeli: am I in the matrix?
5:48 PM - Foxeli: god this is a PC program
5:48 PM - Foxeli: WAKE ME UP (wake me up inside)
5:48 PM - - ̗̀ Darren ̖́-: CANT WAKE UP
5:48 PM - Foxeli: and now were spouting memes...
5:48 PM - Foxeli: probably for the better
Freyja: The soundtrack to this game is so good
Freyja: And so are the animations
Freyja: 2B runs so smoothly it's like water
ODSP: take a sip, it's just like water
Freyja: Like she tilts slightly to the side when running when you move the analog stick slightly to the side
Freyja: Which makes it feel remarkably good
Freyja: Instead of just turning the model
- ̗̀ Darren ̖́-: is there boob and ass physics
Freyja: no
Freyja: And so are the animations
Freyja: 2B runs so smoothly it's like water
ODSP: take a sip, it's just like water
Freyja: Like she tilts slightly to the side when running when you move the analog stick slightly to the side
Freyja: Which makes it feel remarkably good
Freyja: Instead of just turning the model
- ̗̀ Darren ̖́-: is there boob and ass physics
Freyja: no