It looks like the trick is to disable the capture zone, stop the cart, and then set it to move forward after a delay.
Yep, that solved it! Thanks man. I guess for some reason stopping the cart resets the movement AI, because without it stopping first the cart just doesn't know what to do and sits there like an idiot.
Now, just for reference to anyone else who has this problem, here's the TL;DR
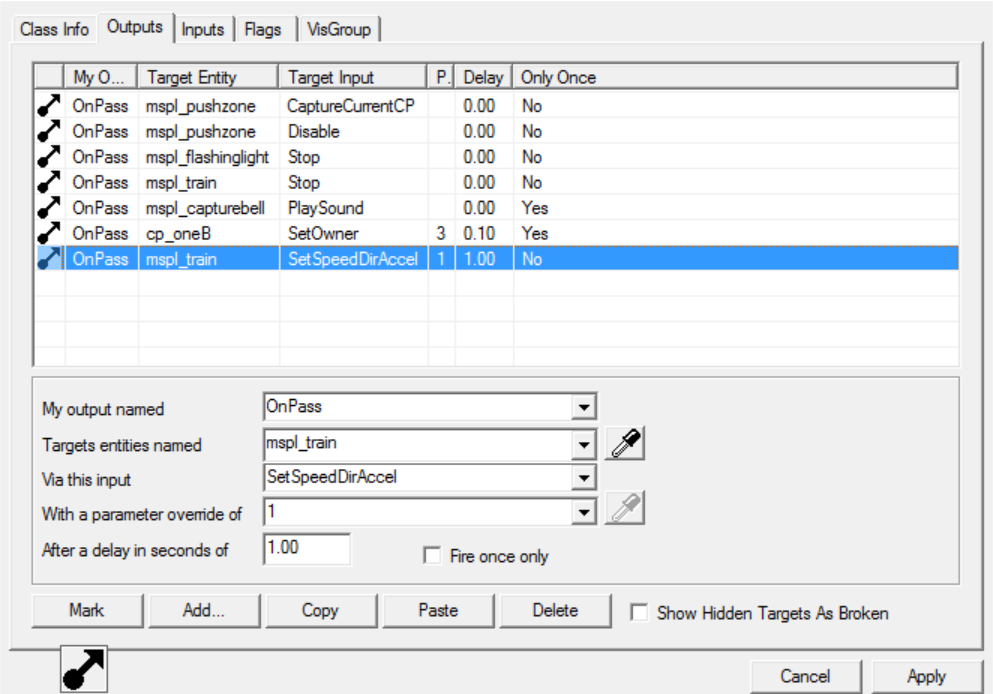
All of the following outputs are placed in the path_track directly above your final Payload capture point.
1. Cart Captures the final point: Call sspl_pushzone with the input CaptureCurrentCP, Call cp_final (or whatever your final capture point is named) with the input SetOwner with a parameter override cooresponding to the capturing team (2 for RED, 3 for BLU)
2. Stop the cart: Call sspl_train with the input Stop
3. Start the cart with automatic movement: Call sspl_train with the input SetSpeedDirAccel with parameter override of 1
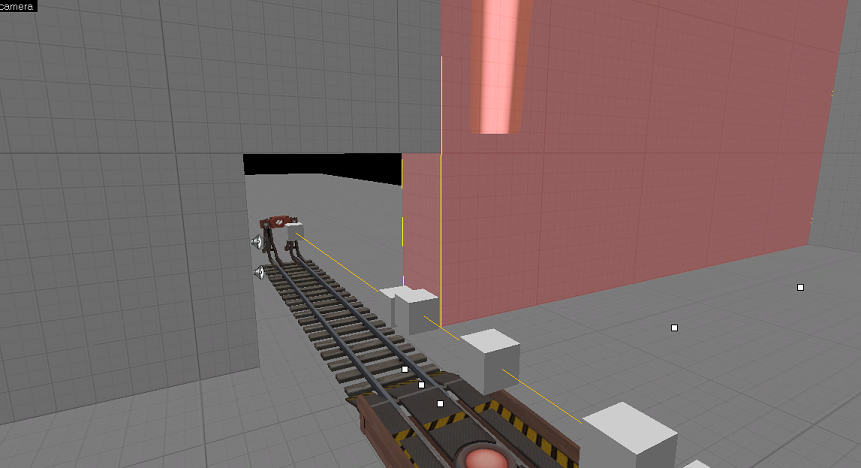
4. Explosion effects: Set the end path_track to stop the cart again, and the flashing light effect on top of the cart (this should be done already, I'm going to assume that you copied your Payload implementation from ABS' game mode test map). Move the cart explosion trigger that was originally at the bottom of the pit to be flush with the rail, and the filter_name should be implemented so that only the cart will trigger it. Once the cart hits the last path_track, it will activate the trigger. Remove cart_tilt or cart_falling sounds and activation outputs in the trigger. Now, set the cart_beep to activate after 1 second delay, and all the other explosion effects (as well as the sspl_cart Kill command) 2 seconds later.
Hopefully that should help anyone else having my problem of moving the cart after capturing the final point on a single stage payload map.